Pour ce type de construction nous retrouvons de manière générale deux sortes de motorisation différentes. La première, les moteurs pas à pas et la seconde les servo-moteurs.
Les moteurs pas à pas transforment les impulsions électrique en un déplacement angulaire précis. C'est à dire qu'à chaque "impulsion" le moteur tourne d'un angle précis.
Le servo-moteur est conçu pour réaliser un mouvement précis selon une commande externe.
Le moteur pas à pas fonctionne en boucle ouverte, c'est à dire que l'impulsion est envoyée mais si pour une raison ou une autre le moteur n'a pas pu effectuer sa rotation (l'axe serait bloqué par exemple) aucune information ne sera renvoyée au système et on aura une erreur de déplacement (perte de pas).
Dans le cas du servo-moteur, c'est un dispositif électronique qui s'occupe de calculer la position et de la maintenir en fonction de la commande envoyée.
Les moteurs pas à pas étant moins onéreux et plus accessible nous n'envisagerons que ce type de motorisation.
Dans la gamme des moteurs pas à pas qui nous intéresse, ceux-ci ont le plus souvent une résolution de 200 pas par tour, c'est à dire qu'à chaque impulsion, l'axe du moteur tourne de 1.8°. Au travers d'une électronique performante, cette résolution peut être divisée facilement 8 fois pour offrir un déplacement encore plus précis.
Si on se base sur une résolution de 1.8° par impulsion avec une vis mère dotée d'un filet de 2mm, à chaque impulsion le chariot avant de 10µm!
Les dimensions:
Quand on n’est pas un pro du domaine, il est assez difficile de dimensionner un moteur correctement pour une application.
Si l'axe de votre machine tourne facilement à la main vous n'aurez pas trop de peine à motoriser l'ensemble. On conseille généralement pour une petite machine de trouver des moteurs d'un couple d'au moins d'1Nm.
J'ai eu très peu d'information sur les moteurs que j'ai trouvés, la seule chose que je sais c'est que le courant nominal des impulsions doit être d'1A et que je les ai eus pour 25€ (le trois avec les frais de port) :-). Ils sont peut-être légèrement trop peu puissants, ce qui provoque des fois des pertes de pas. J'attends une bonne occasion pour les changer. Donc soit viser 1Nm de couple, soit 1.5-2A par phase de courant nominal. Les moteurs récupérés dans des imprimantes sont à exclure pour ce type d'application.
Les moteurs qui nous intéressent ont généralement des tailles standards. Pour les puissants nécessaires à notre application nous aurons le choix le plus souvent entre des moteurs aux dimensions NEMA23 ou NEMA34.
NEMA23
NEMA34
Les moteurs NEMA34 sont plus grands (et plus puissant souvent) que les NEMA23. Nous remarquerons que la dimension de leur axe n'est pas la même non plus (9.53mm de diamètre pour le NEMA34 contre 6.35mm pour le NEMA23). Cette valeur est très importante pour faire l'accouplement à la vis mère d'entrainement.
Pour fixer les moteurs au chassis on peut utiliser les 4 emplacements situés aux extrémités du moteur et réservés à cette effet. Un exemple de fixation:
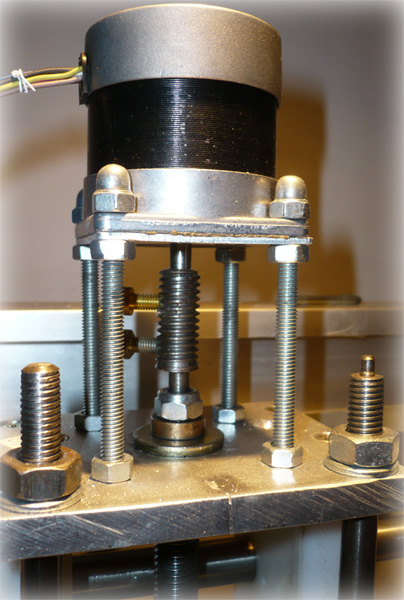
L'idéal pour l'accouplement étant d'avoir un plat sur les deux axes de manière à éviter un glissement de ceux-ci.
Carte de commande des moteurs:
Pour contrôler les moteurs, il est nécessaire d'avoir une électronique dédiée à cette application. Il existe de nombreuses notes d'applications à ce sujet:
Chip L298 (ST) (Pour des moteurs jusqu'à 4A par phase)
Chip A3977 (Allegro) (Pour des moteurs jusqu'à 2.5A par phase)
Nous proposons egalement sur ce site, les plans pour réaliser votre propre carte:
Les plans du drive pour moteur pas à pas avec un A3979
Les plans de la carte de commande via port parallèle
Mais bien souvent, au prix des composants, du temps pour tout rassembler, dessiner le circuit, le corriger, et enfin avoir quelque chose de fonctionnel, il est préférable d'acheter une carte toute prête. Nous avons ainsi profiter d'une chute du cours du dollard pour acheter une carte via ebay. Ainsi pour moins de 100€ nous avons pu obtenir une carte avec 3 A3977 et un port parallèle (isolé par optocoupleur de l'ordinateur) montée et prête à l'emploie. Lors de dernières recherches, on trouve même des cartes drives pour moteur pas à pas à moins de 10€ par moteur! Cliquez-ici pour rechercher directement où acheter des drives pour moteurs pas à pas à quelques euros en utilisant les bons mots clés
:
Cette carte est complètement compatible avec les outils K-Cam et Mach3. Pour exemple, voici la configuration de la carte sous K-Cam:
Les liens:
Pour l'achat de moteurs, de carte de contrôles:
- http://www.nc-step.de
- http://www.ebay.com
Pour fabriquer sa carte soit même:
- http://www.allegromicro.com (constructeur de l'A3977)
- http://www.st.com (constructeur du L298)
- http://www.gotronic.fr (achat de composants)
- http://www.farnell.com (achat de composants)
Les logiciels de contrôle:
- http://www.kellyware.com/ (K-Cam)
- http://www.machsupport.com/ (Mach3)