Pour ceux qui ont déjà visité ce site, ils ont pu découvrir les moteurs pas à pas dans différentes utilisations. L'objectif de cet article est d'expliquer la base du fonctionnement de ce type de moteur de manière à créer par la suite une électronique permettant de contrôler proprement le déplacement de celui-ci. Cet article n'a pas la prétention de percer tous les mystères du moteur pas à pas. Il existe des livres complets à ce sujet. Nous nous limiterons à une explication simplifiée et imagée.
Introduction
Le moteur pas à pas, ou encore stepper motor, est un moteur particulier pour lequel sa rotation s'effectue par pas. C'est à dire, qu'à l'inverse d'un petit moteur à courant continu comme on trouve dans nombreux jouets et qui tourne sans arrêt un fois alimenté, le moteur pas à pas tourne d'un angle spécifique à chaque fois qu'il reçoit une impulsion. Mais comme nous allons le découvrir, ces impulsions ont besoin d'un formatage bien particulier.
Les principales caractéristiques du moteur pas à pas sont:
-
Sa résolution: par exemple 200 pas par tour, c'est à dire qu'à chaque impulsion l'axe du moteur tourne de 1.8° (360°/200).
-
Son couple de maintien (Holding torque): exprimé en Nm indique la force qu'il faut appliquer sur l'axe du moteur pour parvenir à le faire tourner de façon non souhaitée. Plus c'est important, plus le moteur est puissant. Le couple en rotation est donné au travers d'un graphique présent dans les documentations des moteurs. Ce dernier dépend de la vitesse comme le montre l'illustration ci-dessous.
-
Sa résistance ohmique par bobinage: quelques ohms
-
Son courant max par bobinage: de quelques mA à plusieurs Ampères. En cas de dépassement, risque de brûler le moteur.
-
Son poids, ses dimensions (souvent normalisées NEMA17,23,...)
Le moteur pas à pas est un moteur qui fonctionne en "boucle ouverte", c'est à dire que de base dans le moteur, pour fonctionner, il n'y a aucun retour. Si vous envoyez une impulsion pour la réalisation d'un pas (une demande de rotation) et que pour une raison, le pas ne s'exécute pas (l'axe est bloqué) vous n'aurez aucun retour. Ce que l'on appelle un saut de pas.
Bobinage et contrôle
Le tableau ci-dessous montre un exemple de bobinage d'un moteur pas à pas. Nous ne nous intéresserons qu'au moteur bipolaire. Le moteur choisi dans ce cas propose deux modes de cablage en bipolaire, soit en série, soit en parallèle. Le moteur possède ainsi 4 bobines, deux d'entre elles constituant la bobine A, les deux autres constituant la bobine B. Un mode de cablage en série consiste à mettre les deux bobines à la suite l'une de l'autre, cela implique un courant limité mais demande une source de tension supérieur. Le cablage en parallèle implique un courant plus élevé mais une tension moindre.
Le tableau Full Step montre les impulsions à envoyer pour réaliser un pas. Ainsi en plaçant une source d'alimentation positive sur A et B, et la source négative sur A\ et B\, le moteur prend la position du pas 1. Si on inverse la polarité sur la bobine A tout en conservant celle de la bobine B, le moteur va faire un saut au pas 2. et ainsi de suite. Suivant le sens de défilement des impulsions, on fait tourner le moteur dans le sens des aiguilles d'une montre ou dans le sens inverse.
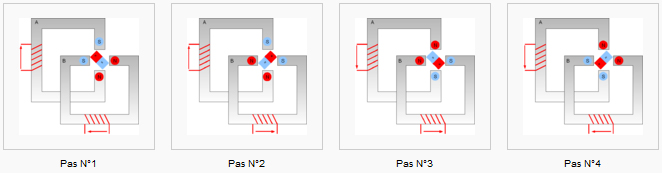
Illustration extraite de wikipedia.org
Sur l'illustration simplifiée ci-dessus on comprend ce qui se réalise au niveau de l'axe du moteur. Pour chaque pas on polarise de façon différente les deux aimants. L'axe du moteur (le rotor) est constitué d'un aimant permanent, celui-ci s'oriente en fonction de la polarisation du stator (éléments externes).
Pour les moteurs qui ont un nombre de pas élevé, la technologie se complique. Dans le cas par exemple d'un moteur pas à pas de 200 pas par tour, que l'on appelle moteur pas à pas hybride (car il mélange deux techniques, celle à aimant permanent et celle à reluctance variable que l'on n'explique pas dans cet article), le rotor est constitué de cinquante dents tandis que le stator est constitué de 8 pôles possédant 5 dents.
Pour chaque pas, l'alignement des dents entre le stator et le rotor est différent. Les dents s'alignent de façon à permettre le meilleur passage du flux magnétique. A chaque pas, l'orientation du flux change et le rotor tourne.

Augmenter la précision
Comme nous avons pu le constater, l'axe du moteur pas à pas tourne afin de s'orienter le mieux possible par rapport au champs magnétique. Dans les explications, jusqu'à présent, nous avons travaillé avec des valeurs de courant dans les bobinages qui sont toujours maximum. A présent, au lieu d'appliquer le courant maximum nous allons faire évoluer les courants dans les bobinages A et B de façon à avoir un pourcentage de la valeur complète comme le montre le graphique ci-dessous. Ainsi l'axe se place dans la position où le flux passe le mieux sachant que cette position se trouve entre deux positions de courant max:

Dans ce cas-ci, chaque pas du moteur est divisé en 4. c'est à dire qu'entre la position maximal du courant et la position 0 on divise en 4 pallier. De telle manière un moteur qui réalisait 200 pas par tour en réalise 800 à présent.
Bien évidemment pour contrôler un moteur de cette manière il est nécessaire d'avoir une électronique évoluée. Celle que l'on va proposer sur ce site permet de diviser chaque pas du moteur jusqu'à 16 fois.